

سه دسته اصلی سامانههای حرکت (چرخدار، زنجیردار و پادار) و چهار دسته ترکیبی که از ترکیب این سامانههای اصلی به دست میآیند، از نظر حداکثر سرعت، قابلیت عبور از مانع، قابلیت بالارفتن از پله/پلکان، قابلیت بالارفتن از شیب، قابلیت راه رفتن روی زمینهای سست، قابلیت راه رفتن روی زمینهای ناهموار، بازده انرژی، پیچیدگی مکانیکی، پیچیدگی کنترل و آمادگی فناوری بررسی می شوند.
۱. مقدمه
پیشبینیهای همه مؤسسات بزرگ تحقیقاتی رباتیک به وضوح نشان میدهد که بازار جهانی رباتیک خدماتی در ۲۰ سال آینده به شدت افزایش مییابد و از نظر تعداد واحدها و فروش از بازار رباتیک صنعتی فراتر میرود؛ به ویژه، رباتهای متحرک زمینی رایجترین دسته رباتهای خدماتی هستند. ۷۵٪ از کل فروش واحدهای رباتهای خدماتی حرفهای در سال ۲۰۱۰ مربوط به رباتهای دفاعی یا میدانی بوده است. بیشتر رباتهای متحرک نه تنها برای محیطهای ساختاریافته، بلکه برای موقعیتهای ناساختاریافته نیز طراحی میشوند. زمینههای مهم کاربرد عبارتند از: امنیت داخلی، نظارت، مداخله در حملات تروریستی، خنثیسازی مین، شناسایی در موقعیتهای خطرناک، کشاورزی و اکتشافات سیارهای. همچنین رباتیک متحرک یک فناوری دوگانه (غیرنظامی و نظامی) است.
معماریهای مکانیکی متعددی برای رباتهای متحرک توسط پژوهشگران دانشگاهی و صنعتی پیشنهاد شده است. هر یک دارای ترکیبی از مزایا و معایب هستند. بنابراین، طراح برای یک کاربرد خاص باید دامنه وسیعی از راهکارهای فناورانه را ارزیابی کند. در مراحل اولیه طراحی، باید محیط عملیاتی پیشبینی شده تحلیل شود. از این رو، مفید است که انواع سامانههای حرکت موجود به صورت فشرده معرفی شده و نقاط قوت و ضعف آنها در شرایط عملیاتی مختلف مقایسه شوند.
این هدف اصلی این کار است که هم نمونههای تحقیقاتی و هم محصولات صنعتی تجاری را در نظر میگیرد. تحلیل آخرین وضعیت فناوری عمدتاً بر راهکارهای محیطهای ناساختاریافته متمرکز است. در محیطهای ساختاریافته، اغلب طرحهای ساده مکانیکی کافی است، اما در محیطهای ناهموار یا سست، طراحی مکانیکی سامانه حرکت بسیار پیچیدهتر است و طرحهای متنوعی پیشنهاد شده است؛ بنابراین یک مقایسه فشرده برای طراحان مفیدتر است.
مقایسهای مشابه در این مقاله انجام شده است، اما با دو تفاوت اصلی: تحلیل تنها بر حوزه اکتشافات فضایی متمرکز نیست و چهار دسته ترکیبی (پا-چرخ، پا-زنجیر، چرخ-زنجیر و پا-چرخ-زنجیر) به طور جداگانه بحث میشوند. ارزیابی ده ویژگی را در نظر میگیرد: حداکثر سرعت، قابلیت عبور از مانع، قابلیت بالارفتن از پله/پلکان، قابلیت بالارفتن از شیب، قابلیت راه رفتن روی زمینهای سست، قابلیت راه رفتن روی زمینهای ناهموار، بازده انرژی، پیچیدگی مکانیکی، پیچیدگی کنترل و آمادگی فناوری.

۲. طبقهبندی سامانههای حرکت ربات متحرک و روش مقایسه
این مقاله سامانههای حرکتی را برای رباتهایی در نظر میگیرد که عمدتاً روی زمین حرکت میکنند. اصول حرکتی خاص (مانند رباتهای جهنده، رباتهای خزنده مارمانند و رباتهای چسبنده به دیوار) بحث نمیشوند. همچنین رویکردهای حرکتی پیشرفته با دو یا چند ربات متحرک همکار در نظر گرفته نمیشوند.
رباتهای متحرک زمینی به سه دسته اصلی طبقهبندی میشوند:
- رباتهای چرخدار (W)
- رباتهای زنجیردار (T)
- رباتهای پادار (L)
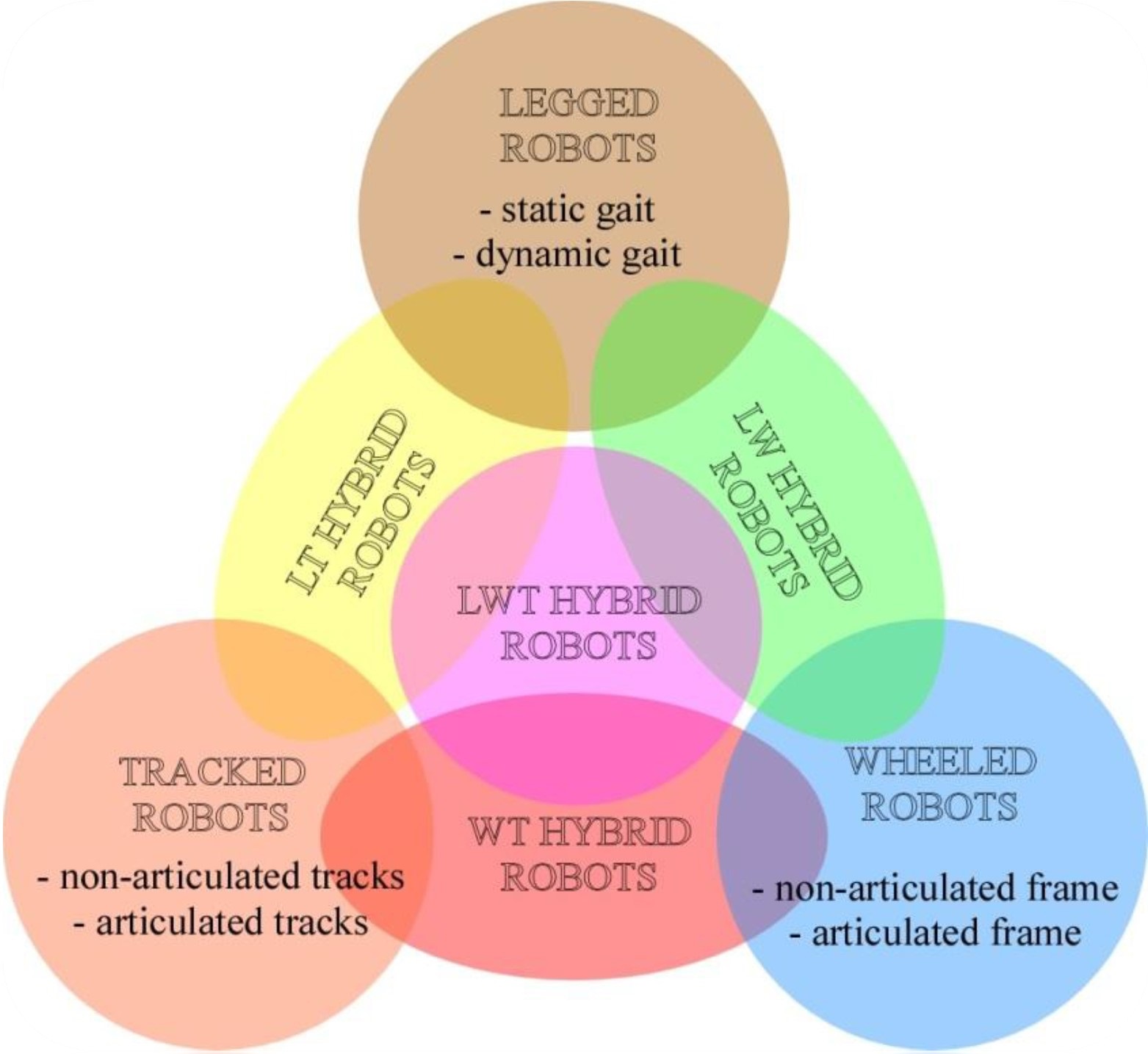
علاوه بر این، رباتهایی با ترکیب این اصول حرکت، معروف به رباتهای ترکیبی نیز وجود دارند. چهار ترکیب ممکن وجود دارد: پا-چرخ (LW)، پا-زنجیر (LT)، چرخ-زنجیر (WT) و پا-چرخ-زنجیر (LWT).
برای مقایسه دقیق، ده ویژگی تعریف شده است. هفت ویژگی اول به عملکرد خالص حرکت مربوط میشوند و سه ویژگی آخر پیچیدگی سیستم و آمادگی فناوری را توصیف میکنند.
۳. سامانههای حرکت ربات متحرک
در این بخش، ویژگیهای اصلی دستههای سامانه حرکت خلاصه و با هم مقایسه میشوند.
۱.۳ سامانههای حرکت چرخدار
رباتهای چرخدار میتوانند به سرعت بالا با مصرف توان پایین برسند و با کنترل چند درجه آزادی فعال هدایت شوند، اما توانایی آنها در عبور از موانع به طور کلی محدود است. حداقل تعداد چرخ برای پایداری ایستا سه عدد است. رباتهای سه چرخ با دو چرخ محرک دیفرانسیلی و یک چرخ هرزگرد در محیطهای ساختاریافته گسترده هستند. برای محیطهای ناساختاریافته، رباتهای چرخدار معمولاً ۴، ۶ یا ۸ چرخ دارند و به شاسی مفصلی یا سیستم تعلیق نیاز دارند. رباتهای چرخدار با شاسی غیرمفصلی به ندرت برای بیش از سه چرخ استفاده میشوند. نمونههایی از رباتهای چهار، پنج، شش و هشت چرخ معرفی میشوند. در مجموع، رباتهای چرخدار از نظر سرعت و بازده انرژی بالا، اما از نظر قابلیت حرکت در محیطهای ناهموار و عبور از مانع پایین هستند.
۲.۳ سامانههای حرکت زنجیردار
رباتهای زنجیردار به دلیل سطح تماس بزرگ با زمین برای حرکت روی زمینهای ناهموار و سست و عبور از موانع مناسب هستند، اما کندتر از رباتهای چرخدار حرکت کرده و انرژی بیشتری مصرف میکنند. رباتهای زنجیردار میتوانند دارای زنجیرهای غیرمفصلی یا مفصلی باشند. رباتهای با زنجیر غیرمفصلی دارای مکانیک و کنترل بسیار ساده هستند (مانند Nanokhod). برای بهبود توانایی در زمینهای ناهموار و موانع، از دو یا چند زنجیر با تحرک غیرفعال استفاده میشود (مانند Robhaz DT3 و Gunryu). رباتهای زنجیردار از نظر قابلیت حرکت در زمینهای سست و ناهموار و عبور از موانع در سطح متوسط تا بالا قرار دارند، اما سرعت و بازده انرژی آنها متوسط است.
۳.۳ سامانههای حرکت پادار
رباتهای پادار تحرک گستردهای دارند که آنها را برای محیطهای ساختاریافته و ناهموار مناسب میکند. با این حال، نسبتاً کند هستند و انرژی زیادی مصرف میکنند. مهمترین ویژگی آنها نوع راه رفتن (گیت) است که میتواند ایستا یا پویا باشد. در راه رفتن ایستا، ربات همیشه متعادل است. در راه رفتن پویا، ربات همیشه متعادل نیست (مانند دویدن یا یورتمه رفتن). راه رفتن پویا بازده انرژی بالاتری دارد و میتواند بدن را از ناهمواریها جدا کند. دو استراتژی اصلی کنترل گیت پویا: رویکرد مبتنی بر اصل نقطه ممان صفر (ZMP) و راه رفتن پویای غیرفعال و راه رفتن چرخه حدی. نمونههای پیشرفته شامل رباتهای دوسای (هیومنوئید)، ربات چهارپای BigDog، و ربات ششپای RHex است. رباتهای پادار از نظر قابلیت عبور از مانع، بالارفتن از پله و حرکت در زمینهای ناهموار در سطح بالا، اما از نظر سرعت و بازده انرژی در سطح پایین (راه رفتن ایستا) تا متوسط (راه رفتن پویا) هستند.
۴.۳ سامانههای حرکت ترکیبی
سامانههای حرکت ترکیبی احتمالاً جالبترین راهکارها هستند زیرا مزایای کلاسهای مختلف را ترکیب کرده و سعی در اجتناب از معایب دارند.
۱.۴.۳ سامانههای ترکیبی پا-چرخ
این رباتها بازده انرژی چرخها را با انعطاف عملیاتی پاها ترکیب میکنند. سه روش اصلی ترکیب: تجهیز ربات چرخدار به پاهای اضافی، استفاده از ماژولهای جمعشونده که میتوانند به عنوان چرخ یا پا استفاده شوند، و قرار دادن چرخها روی لینکهای پا. نمونههایی مانند Octopus و Spacecat و Epi.q معرفی میشوند.
۲.۴.۳ سامانههای ترکیبی پا-زنجیر
این رباتها برای محیطهای دشوار نسبتاً محبوب هستند، مشروط بر اینکه سرعت و بازده انرژی حیاتی نباشد. نمونههایی شامل رباتهای iRobot، Titan X و ربات Yokota.
۳.۴.۳ سامانههای ترکیبی چرخ-زنجیر
ترکیب چرخ و زنجیر زمانی مؤثر است که عملکرد حرکتی خوب روی زمینهای سست و ناهموار با بازده انرژی روی زمینهای فشرده و صاف مصنوعی مورد نیاز باشد. نمونههایی شامل ربات با زنجیرهای تغییرشکلپذیر، Helios VI و Galileo wheel.
۴.۴.۳ سامانههای ترکیبی پا-چرخ-زنجیر
Azimuth نمونهای از پلتفرم رباتیکی است که هر سه نوع حرکت را ترکیب میکند. عیب اصلی آن پیچیدگی مکانیکی بالا است.
۵.۳ مقایسه ویژگیهای سامانههای حرکت
یک نمودار کیفی و یک جدول مقایسه جامع (جدول ۲ در مقاله اصلی) ارائه شده است که هفت دسته را از نظر ده ویژگی مقایسه میکند. رباتهای چرخدار در سرعت و بازده انرژی بهترین هستند. رباتهای پادار در قابلیت عبور از مانع و حرکت در زمینهای ناهموار بهترین هستند. رباتهای زنجیردار در میانه قرار دارند. سامانههای ترکیبی تلاش میکنند مزایا را با هم داشته باشند، اما حمل دستگاه حرکتی غیرفعال به عنوان بار مرده، عملکرد کلی را کاهش میدهد. معیارهای ارزیابی در جدول ۳ ارائه شده است. نکته مهم: لغزش پدیدهای پیچیده است. پیچیدگی مکانیکی و کنترلی نیز معیارهای کلیدی انتخاب هستند.
۴. بحث درباره روندهای آینده در رباتیک متحرک
پیشبینی میشود بازار جهانی رباتیک خدماتی در ۲۰ سال آینده به شدت افزایش یابد. شرایط کلیدی برای گسترش رباتهای پادار عبارتند از: توسعه روشهای کنترل گیت پویای تطبیقی مبتنی بر مدل، افزایش توان محاسباتی ریزپردازندهها و چگالی انرژی باتریها، و در دسترس بودن محرکهای با توان ویژه بالا. یکی از مهمترین چالشهای فناورانه در ۱۰-۱۵ سال آینده، انتقال رباتهای پادار با کارایی بالا از دنیای پژوهش به دنیای صنعت و تجارت از طریق فرآیند دشوار کاهش هزینه است. از سوی دیگر، هنگامی که برخی ویژگیها از اهمیت اولیه برخوردارند یا هزینه و پیچیدگی باید محدود شود، سامانههای حرکت ترکیبی اغلب مناسبترین راهکارها هستند. بنابراین، تنوع زیاد در رباتیک متحرک کنونی احتمالاً در آینده نیز ادامه خواهد یافت.
۵. نتیجهگیری
آخرین وضعیت فناوری سامانههای حرکت برای رباتهای متحرک تحلیل شده است تا نشانههای مفیدی برای مراحل اولیه طراحی فراهم شود. سه دسته اصلی و چهار دسته ترکیبی از نظر ده ویژگی مقایسه شدند. دو خط تحقیقاتی امیدوارکننده عبارتند از: حرکت پادار چهارپا با گیت پویا برای کاربردهای سطح بالا در محیطهای خارج از ساختمان کاملاً ناساختاریافته، و حرکت ترکیبی به ویژه پا-چرخ و پا-زنجیر برای پلتفرمهای رباتیکی جمعوجور و کمهزینه.
مراجع
دیدگاه خود را بنویسید